在自動運輸過程中,AGV小車接收基地主控計算機的指令并通過通訊系統上報自身狀態,主控計算機向AGV下達任務,同時采集AGV發回的信息,用于監控AGV的工作狀態。可以通過車載電腦完成以下監控:手動控制、安全裝置激活、電池狀態、轉向限位、剎車釋放、行走燈、驅動和轉向電機控制、充電接觸器等。
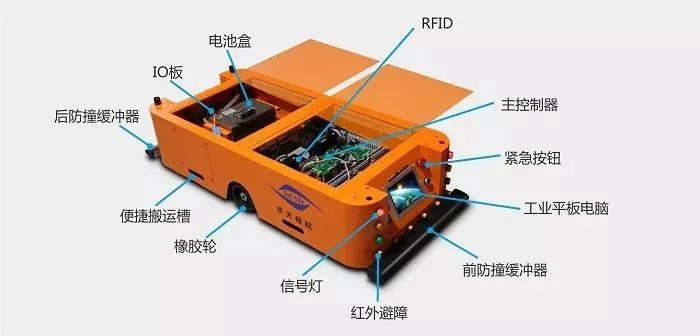
搭載AGV的車載計算機在硬件上一般由PLC控制器或單片機實現。是AGV機器人行駛和作業的直接控制中心。主要功能是:接受來自主控計算機的命令和任務。向主控計算機報告AGV自身的狀態,如AGV的位置、運行速度、方向、故障狀態等;根據接受的任務和運行路線,自動運行到目的地裝卸站。在此過程中,會自動完成跑步路線的選擇。運行速度選擇、自動卸貨、運行方向避開小車、安全報警等
一般AGV小車與基地主控計算機通過無線電通訊,或通過埋在線路中的導線進行感應通訊,或通過紅外激光,實現避碰調度、工作狀態檢測, 以及 AGV 機器人之間的任務調度。 固定路徑AGV多采用埋入地槽的通信電纜或固定位置的紅外設備進行通信,而自由路徑AGV多采用無線電通信。下面介紹一下無人工廠的AGV小車是如何實現無線通信的。
一、Indoor AGV小車項目詳情:作為在工業環境中運行的設備,首先要保證通訊的可靠性。同時,由于AGV小車的上下料需要往返于不同的工作區域,而且每個位置的金屬屏蔽面不同,短的WiFi通信無法完全覆蓋,所以小車必須能夠漫游多個AP之間進行通信,保證與后臺的正常交互。綜上所述,WiFi轉換器必須具備以下特點:抗干擾能力好,透明傳輸,熱點漫游。
二、戶外AGV小車項目詳情:與室內鋼筋結構的無線屏蔽干擾不同,戶外搬運工地一般在開闊地形金屬屏蔽較少,但有較大的建筑物和直線距離更長,所以不需要節點漫游功能覆蓋其工作區域,環境比室內更嚴酷。要求無線轉換器具有以下特點:抗干擾能力強、環境適應性強、通信距離遠、受大物體和小障礙物影響小。
AGV小車通信系統有連續和分布式兩種模式。
一、連續式:允許AGV在任何時間、相對于地面控制器的任何位置使用射頻方式,或使用埋在導軌中的導線進行感應通信,如無線電和紅外激光通信方式。目前紅外激光實時雙向數據通信距離可達120米。如果激光功率不足,可每隔15至20米進行一次接力。
二、分散式:在預定位置,例如AGV機器人停車站,提供特定AGV與地面控制器之間的通信。這種通信一般是通過電感或光學方法實現的。分布式通信的缺點是AGV在兩個通信點之間發生故障,將無法與地面控制站取得聯系。目前大部分AGV采用分散式通訊方式,主要是因為價格相對便宜,兩個通訊點之間故障少。