【檢測原理】
檢測系統由工業相機、工業鏡頭、圖像采集卡、工業光源、起偏震片、PC機以及機械結構和機械傳動等構成。通過檢測精度、檢測速度、視野范圍、工作距離、工件尺寸來選取合適的工業相機和工業鏡頭。通過數據傳輸的大小進行圖像采集,本文采用漫反射條形組合光源。
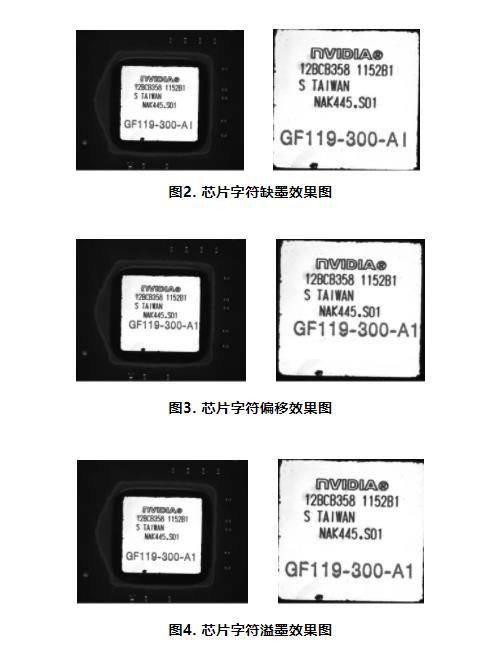
【瑕疵類型】
自動化視覺識別檢測芯片上的字符瑕疵,包括:字符偏移、缺失、溢墨。
【檢測難點】
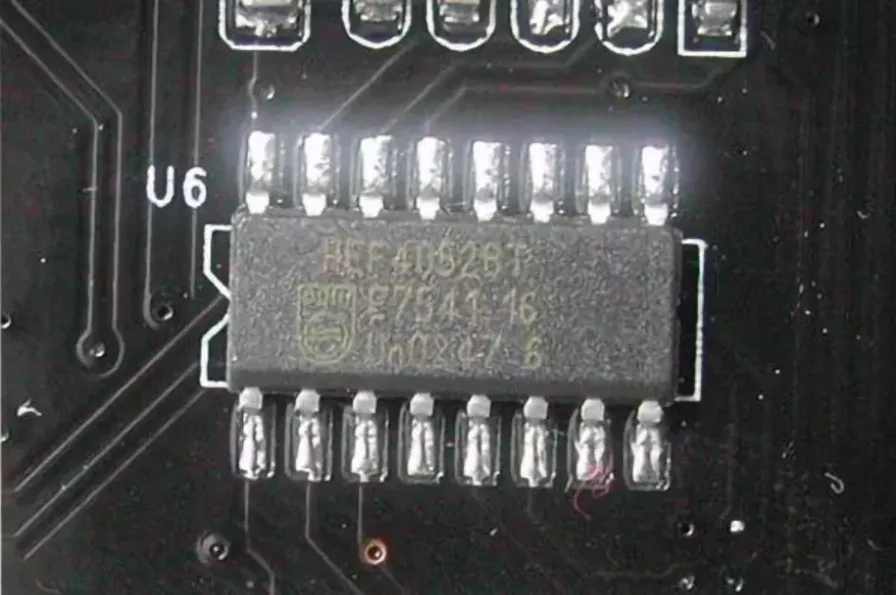
① 芯片表面有油污等雜質怎么檢測,普通光線無法穿透油污,無法照亮芯片上的字符。
② 芯片上的字符較小,約1mm*1mm,因此需要高分辨率遠心鏡頭來成像觀測。
③ 芯片識別需滿足自動化高效檢測,拍照頻率為0.3s/pcs,因此需要千兆網工業相機。
【數據記錄】
保存每班次生產記錄到數據庫,可供查詢、打印
【檢測步驟】
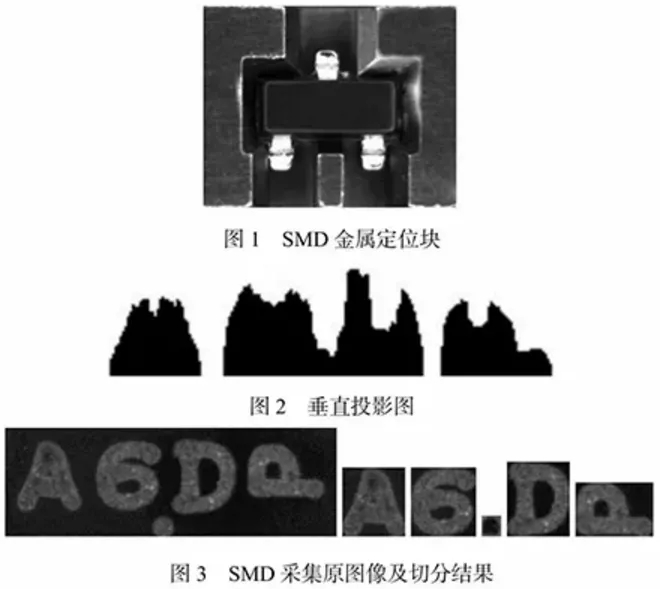
1、字符定位
字符定位通過設計金屬定位塊的方式,利用金屬材料在光源輻照下的輻射特性與SMD的差異性提高對比度來進行快速定位。
2、字符分割
在進行字符分割之前,要進行SMD芯片的位姿矯正。SMD的歐式運動是先旋轉、后平移的組合,所以可以用剛體運動來表示位姿。利用二值化圖像的像素分布直方圖進行分析,從而找出相鄰字符的分界點進行分割。在利用垂直投影切分的方式進行字符切割的結果,如下圖所示。
3、字符缺陷識別
字符缺陷識別采用基于邊緣特征的模板匹配。模板匹配的基本思想是讓模板在目標圖像中做平移運動,將模板左上角和待檢測的圖像左上角重合,每移動一個像素,計算模板與待匹配圖像的相似度,遍歷結束之后,將符合閾值的位置認定為最佳匹配位置。
基于灰度的互相關模板匹配是通過用模板圖像遍歷待匹配圖像,每移動一個像素,計算對應部分的互相關值,將互相關值的最大值作為最佳匹配位置。基于灰度的互相關模板匹配缺點是在光場不均勻情況下,不具有魯棒性。歸一化互相關系數法是一個亮度、對比度線性不變量,能夠明顯改善光照的線性變化帶來的影響。
但是隨著圖像分辨率的提高,圖像匹配的時間會增加,匹配準確度也存在差異,甚至會發生匹配失效的情況,并且由于半導體芯片的位姿和完整性等存在差異,會引起光照的非線性變化,這會導致圖像的灰度差異大,進而導致模板匹配結果不準確。較于基于灰度的互相關模板匹配,基于邊緣的模板匹配不需要建立兩幅圖像之間點的對應關系,具有較好的魯棒性。模板由目標圖像邊緣的一系列點組成,如下圖。
案例結果展示: